现在买特斯拉FSD会成冤大头?HW4.0装车,内核提升不大
![]() 樵车
·
樵车
·

最近购买特斯拉的各位车主们,最好先别花钱开通Autopilot,目前这个阶段已经可以算是这套软硬件的生命末期了,再花3.2万或者6.4万买一套“老系统”,有成为大冤种的可能。
因为最新的一套特斯拉自动驾驶软硬件已经曝光了,而且很有可能在3月1日与我们正式见面。
在今年一月初,特斯拉向美国联邦通信委员会申请,在其车辆上增加一个新的雷达,并且计划在1月份开始销售,根据这个时间来推测,最新的ModelS/X车型上,已经用上了最新的自动驾驶软硬件。
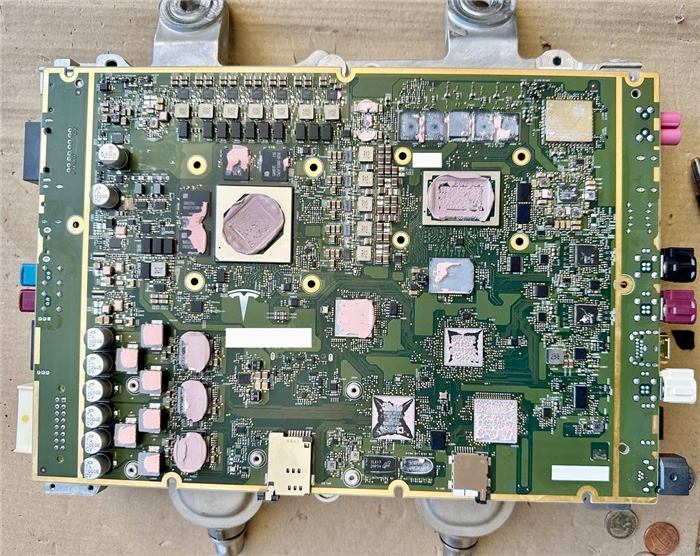
就在今天凌晨,推特上的“绿神”@greentheonly披露了特斯拉第4代Autopilot硬件HW 4.0的图片,这个在互联网上流传了近两年的4.0硬件,终于和我们见面了。
算力翻3倍,增加摄像头,但内核提升不大?
那么相比于目前特斯拉的HW3.0,或者是在国内混装减配的HW2.5,HW4.0究竟强了多少?特斯拉自动辅助驾驶的整体逻辑又有了新的变化?
首先,这款HW4.0硬件与之前3.0已经完全不同,4.0硬件的尺寸把3.0明显变大了一圈,硬件上的接口也变得完全不一样,3.0硬件并不能直接升级到4.0,也就是说想通过拆机来搞硬核OTA的做法不太能实现得了,就算可以,你觉得订多少钱合适?

尺寸虽然变大了,但是其内核部分的升级,从参数角度来看并不算很大,特斯拉HW4.0依然基于三星Exynos-IP,内部CPU的内核从12个增加到20个,这20个又分为5个集群,每个集群里有4个内核,最大频率为2.35GHz,闲置频率为1.37GHz,TRIP内核数量从2个增加到3个,最大频率2.2GHz。
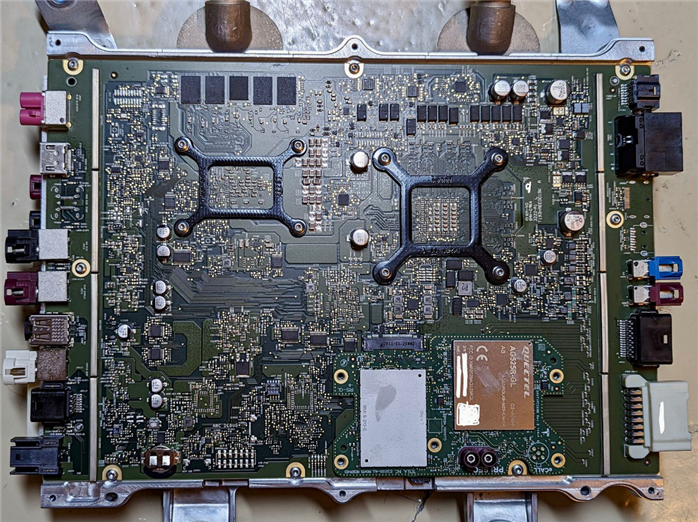
HW4.0的主板整体设计是基本上完全对称的,特斯拉在系统冗余方面,应该也做了双份准备,这一部分我们还要等到时候的发布会介绍。
芯片算力部分的升级幅度比较大,特斯拉目前使用的是2019年装配的第一代FSD芯片,单片算力72Tops,HW3.0使用了2颗芯片,总算力144Tops,算力属于中等水平,而随着英伟达Orin、Thor,以及地平线征程5等芯片的出现,第一代FSD芯片的算力确实有些不够看了。
HW4.0使用的第二代FSD芯片预估的总算力在300Tops-500Tops左右(预计单片算力216Tops),属于目前一个比较中规中矩的水平,基本上可以达到HW3.0硬件算力的3倍以上,新一代的FSD芯片由三星代工,并非台积电,采用了7nm制程,虽然比不上英伟达和高通的最新5nm支撑自动驾驶芯片那么精密,但是这款芯片采用比较成熟的制程工艺,成本更低,而且三星目前正在与台积电进行价格战,台积电代工FSD芯片的成本可能比三星高3倍以上。所以,选择何种工艺,谁来代工,这对于对成本十分敏感的特斯拉来说,非常好做选择。
算力提高了3倍以上,处理的数据量理应变得更多,而且种类更多,那么特斯拉HW4.0在感知硬件部分有什么变化呢?
主打视觉感知的特斯拉,这一次增加了摄像头接口数目,把原先的9个增加到了12个。
选装Autopilot的车型,前置三目摄像头,变为了双目,车辆新增了2个侧视摄像头,以及1个前摄像头,加上原本的1个倒车影像摄像头,4个侧向ADAS摄像头,以及座舱内的1颗摄像头,一共11颗,还有1个备用摄像头。从在这一次的这个摄像头数目,就可以进一步做实了之前网上曝光的新款Model3在前大灯的位置加装摄像头的说法,这部分确实是要参与到辅助驾驶感知中。
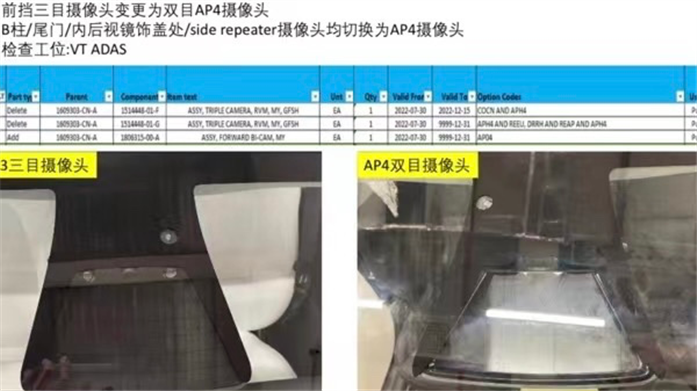
特斯拉这一次把前向的三目摄像头,换为了双目,可以看作是一个很大的变化,特斯拉感知摄像头像素低这件事,之前一直被不少人诟病,相比于新势力们用的800万像素,甚至是1500万像素的摄像头模组,特斯拉不到120万像素的摄像头确实不太拿得出手。而在HW4.0的软硬件下,特斯拉的前向感知摄像头从120万像素提升到了500万像素。
摄像头的像素提升了4倍左右,制造的成本却只提升了1倍,120万像素摄像头的成本大约150元,500万像素大约300元,高像素最主要的还是用于对更远距离的目标进行识别和监测,100万-200万像素摄像头有效探测距离在100—150m,视场角却只有50°左右,但500万像素摄像头,却可以在实现200m以上探测距离的同时,还可拥有100°左右的视场角,探测距离和角度的扩大,其捕捉到的数据量也会呈几何倍数增长,另外高像素摄像头对于暗光环境下的感知能力也会有所提升。

雷达又回来了,但之后大概率还会取消?
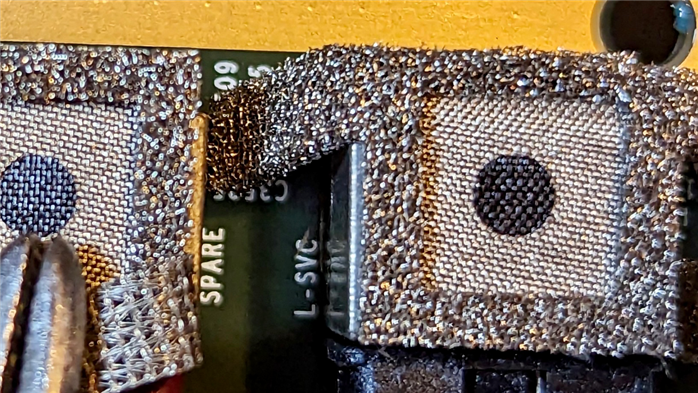
数量更多、像素更高像素的摄像头,可以让特斯拉的感知能力有一定的提升,300Tops以上的算力处理起来并不吃力,此外特斯拉还增加了3频天线的全新GPS模块,还有本应该消失掉的雷达接口和Phoenix毫米波雷达加热器,而雷达通信为100 Mbps的以太网。
在2021年中期,特斯拉把在北美市场交付车型的毫米波雷达给取消了,当时就掀起了不小的波涛。而2022年底,特斯拉把北美市场交付的超声波雷达(倒车雷达)也给取消了,特斯拉Autopilot成了真正的纯视觉方案。
马斯克之前说纯视觉的安全性会比视觉+雷达高,可是不到一个季度,在新款的特斯拉HW4,0上,毫米波雷达迎来了回归,而且可能是4D成像毫米波雷达,打脸竟然来得这么快。

特斯拉这一次加回来的毫米波雷达,可能是自己也有些含糊了,美国的调查部门一直在严查特斯拉的相关事故,以及幽灵刹车的问题,纯视觉带来的幽灵刹车问题已经快成了特斯拉的标签,而把毫米波雷达加回来之后,可以增加一些冗余。
但是,我认为特斯拉很有可能在HW4.0相对成熟之后,会把毫米波雷达再度取消,因为目前绝大多数不能成像的雷达传感器,本来就是一种对视觉的冗余,或者说可以弥补一些视觉算法能力不足的问题,我们最常见的视觉+多传感器的方案,不可否认确实是有在自动驾驶研发过程中,抄近道的嫌疑,视觉处理能力不足时,就需要依靠雷达传感器,甚至是高精地图、众包地图等。

而HW4.0目前还处于量产装车的最初期阶段,视觉逻辑相比以往有很大的不同,特别是在前向感知部分,三目变双目,增加了前侧向的视觉感知摄像头,与HW3.0有着太大的不同,所以在这个阶段特斯拉加入毫米波雷达,甚至是激光雷达都不为过。
总结
算力翻3倍、摄像头增加3个、三目变双目、像素提高4倍,还增加了雷达,特斯拉HW4.0与末期的HW3.0的明显差别大概就是这些,总的来说相比于新势力蔚小理们的辅助驾驶进化幅度,特斯拉这个还是比较保守的,毕竟原本的实力已经在这摆着了。

马斯克是这样评价HW4.0的:HW4.0超越HW3.0,如果上一代比人类安全200%或300%,那么HW4.0可能比人类安全500%或600%。冷静一下,特斯拉发展到了现在,它的所谓完全自动驾驶,依然达不到自动驾驶的能力,即便是HW4.0也不行。



